The original plan for my first robotic car was to use two 5V power banks. One would power the Raspberry Pi and the Arduino while the other one would power the motors. This did not work. The power for the Raspberry Pi and the Arduino worked fine. The problem was that the motors wanted more voltage and current than a phone power bank can supply. The solution for the Mark 1 car was to switch one power bank for a pair of 18560 rechargeable batters.
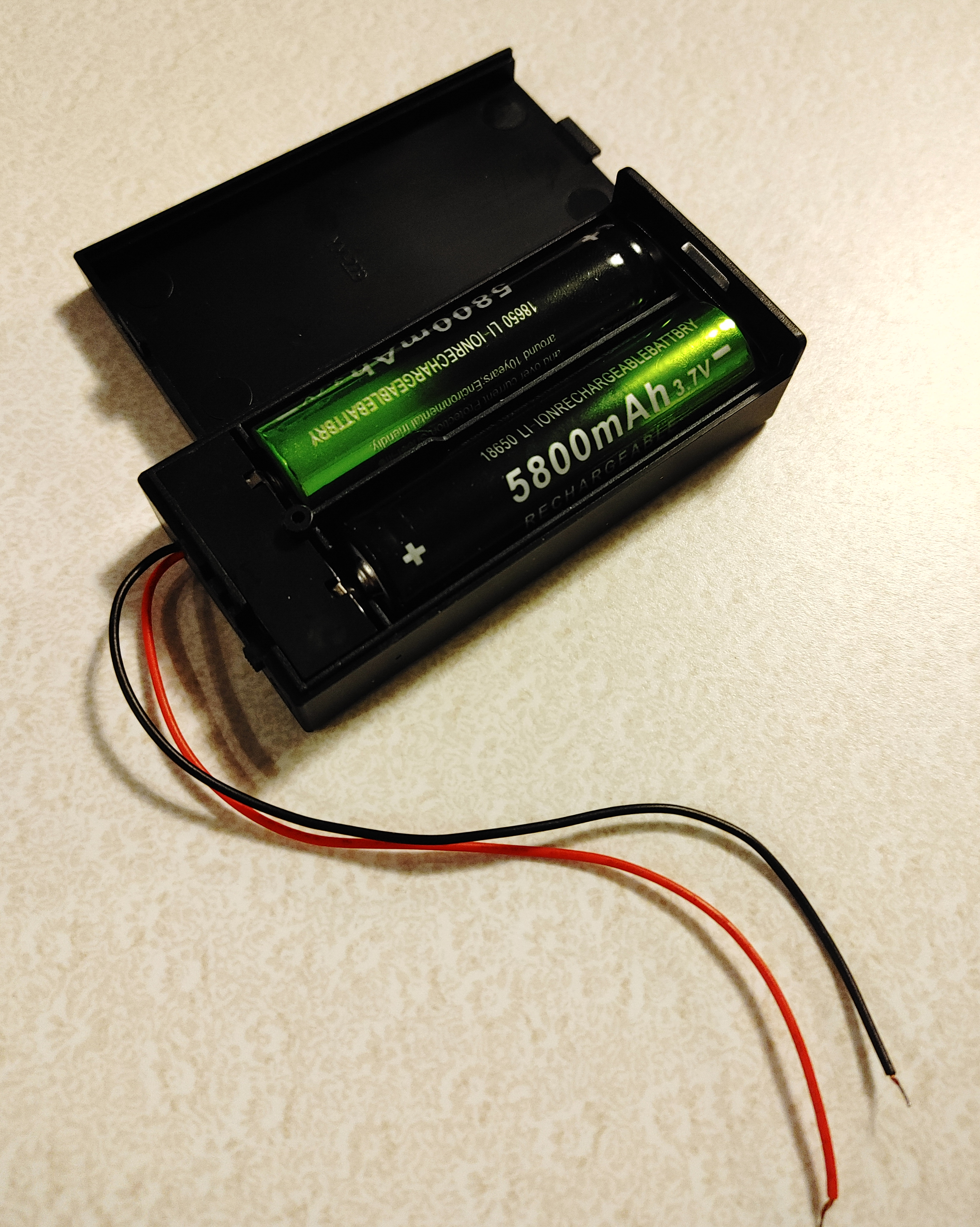
The 18560 batteries are rated at 3.7V though I found that when they were fully charged they produced 4.2V each. With this the motors could run off of 8.4V with plenty of amperage.
For the Mark 2 car, I decided to go with a single power source, the dual 18560 battery pack. The two 18560 batteries is sufficient to power all the motors plus the Raspberry Pi 4 and Pico. The advantage is that only a single power source is used and comes with its own on/off switch. The disadvantage is that the voltage output of the battery pack is too high for the Raspberry Pi and Pico.
I purchased the battery packs in a set of four from Amazon.com at:
Dual 18560 Battery Holder with off/on switch.There is a solution for the voltage problem. A DC step down converter will reduce the DC voltage to a lower voltage. My plan is to use a 3A 5V DC-DC Converter Step Down UBEC Module. With the UBEC module, the full 8.4V can be sent to the motor control modules while 5V are sent to the Raspberry Pi, Pico, and other modules. More about the UBEC module and the motor control modules will be discussed in future posts.